|
|
特点:* S5 U, K0 b+ U* ^, y$ w
- 支持X-Plane 12平台5 C2 z9 V1 O* w* m
- 更优化的用户界面
5 ~3 z' _ d$ e, I. X- 双套或三套并联安装支持) a7 N. \; \2 B; X0 f& J
- 支持副驾驶独立仪表、飞行指引仪与自动驾驶仪
- ^' y; L0 P q& J7 t- 兼容所有现有单套驾驶舱集成方案的机型2 u6 h: a9 s& E* |3 W/ g! ]7 C1 n+ n
- 辅助定位:单/双DME更新及三信号混合
- s' R/ y% `' i% |' v- 完整自检系统,故障时显示真实错误代码
/ l8 Z: u% d2 `( Z( E; \- 协和专用版含特殊自检逻辑(普通版超音速飞行时会报错)
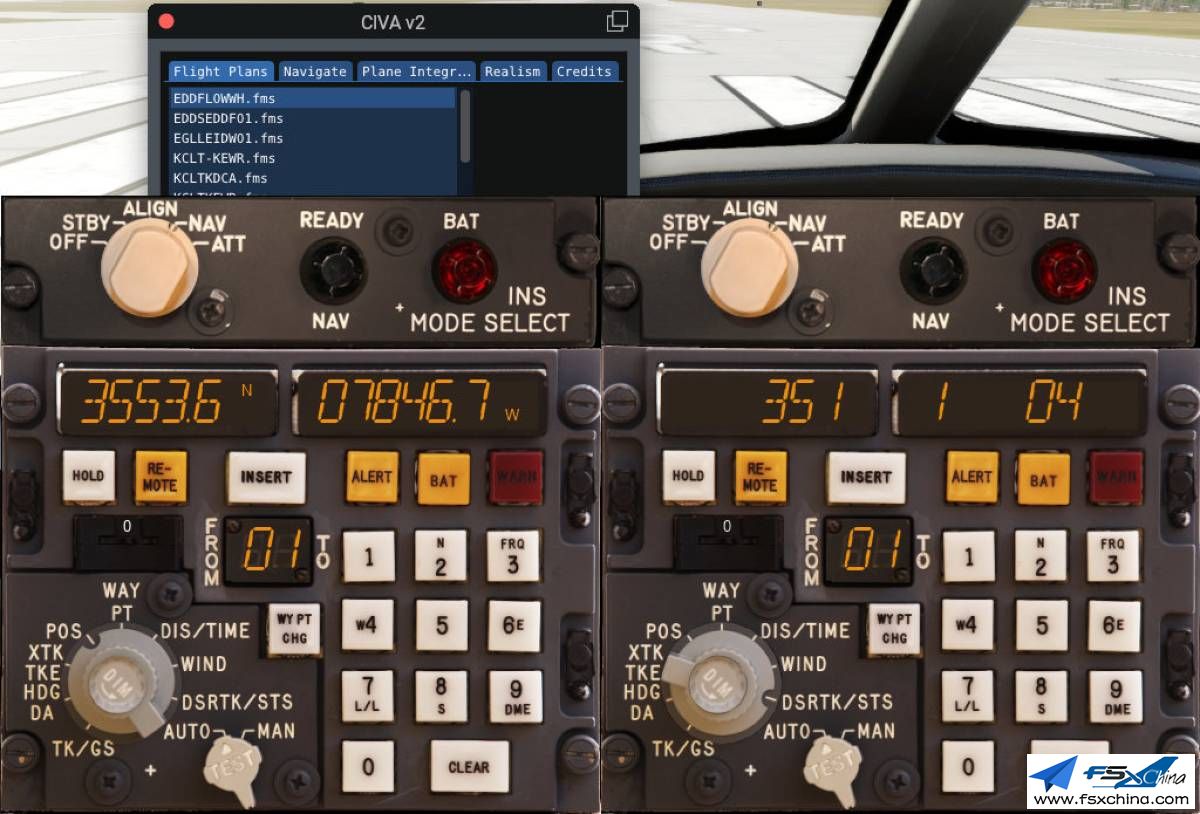
1 }; M3 H) s7 M, @ Y# F5 z$ s- 支持地面/空中部分加载X-Plane .fms格式飞行计划$ a* _) R9 n* w. M k5 l/ Y( C. t" c
- 内置谷歌地图/航海坐标输入辅助界面
0 t# D% U; F0 D( @/ o* z- 支持鼠标滚轮操作5 i; c& ^3 r, }- T" v
- 仅兼容X-Plane 12(不支援旧版本)2 n5 z$ L" I) A0 Z, ?$ \
- 原生支持M1芯片Mac设备
$ Q% ?" ~$ B* b- 可完全按照1977年原始手册操作(含故障排除流程)+ H# K9 L0 i% N) Q& j. g
: B3 _, V* t: I. S5 w
德尔科Carousel IV-A惯性导航系统(昵称"CIVA"):
9 O4 W- Z$ ^( U- P6 a作为无需外部参照的自主导航设备,该系统通过计算机、运动传感器和陀螺仪持续解算飞行器的位置、姿态与速度(航位推测法)。在90年代GPS普及前,它无疑是民航领域最主流的惯性导航系统,曾装备于707、727、部分737-100/200、DC-10、L-1011三星客机以及早期747-100/200/300等机型。/ M: d! ]3 L& h4 W& J; E( j
! H& U/ ~. F; ^" {5 Z$ t核心特性:
' c! L; x5 r2 C/ L! V5 X- 完美兼容FlyJSim 727系列(亦支持其他机型)* u; a* K9 ?* ]$ V; S5 w
- 拟真预热-初始化-校准流程
1 [! L4 L0 [6 q6 x- 可选快速校准立即投入飞行
+ Z( m3 X* Y9 i( ?0 r- L6 q$ ^- 完整模拟所有显示模式(含HOLD模式):6 D% Z' L$ ]+ l: t, ~& C
可显示地速、航迹角、偏流角、航迹偏差、位置信息、剩余距离、预计航程时间、风速风向、纵向加速度及顺逆风分量等参数# p0 B/ M: O- N: i
- 自动导航最多9个航路点% j/ A# k5 c1 V$ ^2 e6 d, a& [- m
- 可加载X-Plane飞行计划替代手动输入/ F# E' H! ~1 D$ P4 w
- 结合DME高度的单站更新功能* X e, ~8 h, r
- 拟真位置漂移与平滑更新算法! f+ [2 W6 x& W
- 内置30分钟应急备用电源
; T# P% U* ^2 w) ^
; d" f. c" X" X. y123网盘:
9 s3 \6 z# i: t; z
/ }2 @% t1 L" o v2 J/ M* ]8 v百度网盘:( B. N) }7 l% K+ j+ j
|
|




 IP卡
IP卡 狗仔卡
狗仔卡



 请点击此处下载
请点击此处下载 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 显身卡
显身卡